Ros Camera Calibration Charuco . The function receives a list of detected corners and its. ros package for calibrating stereo cameras via checker or charuco boards. camera calibration using charuco. this function calibrates a camera using a set of corners of a charuco board. camera calibration relies on predictably shaped and easy to localize calibration targets. Knowing the targets to identify in. camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. We call realsense with python, calibrate with charuco marker board, and everything is. Camera pose estimation using charuco chessboard.
from www.mdpi.com
camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. ros package for calibrating stereo cameras via checker or charuco boards. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. The function receives a list of detected corners and its. this function calibrates a camera using a set of corners of a charuco board. camera calibration relies on predictably shaped and easy to localize calibration targets. Camera pose estimation using charuco chessboard. Knowing the targets to identify in. camera calibration using charuco. We call realsense with python, calibrate with charuco marker board, and everything is.
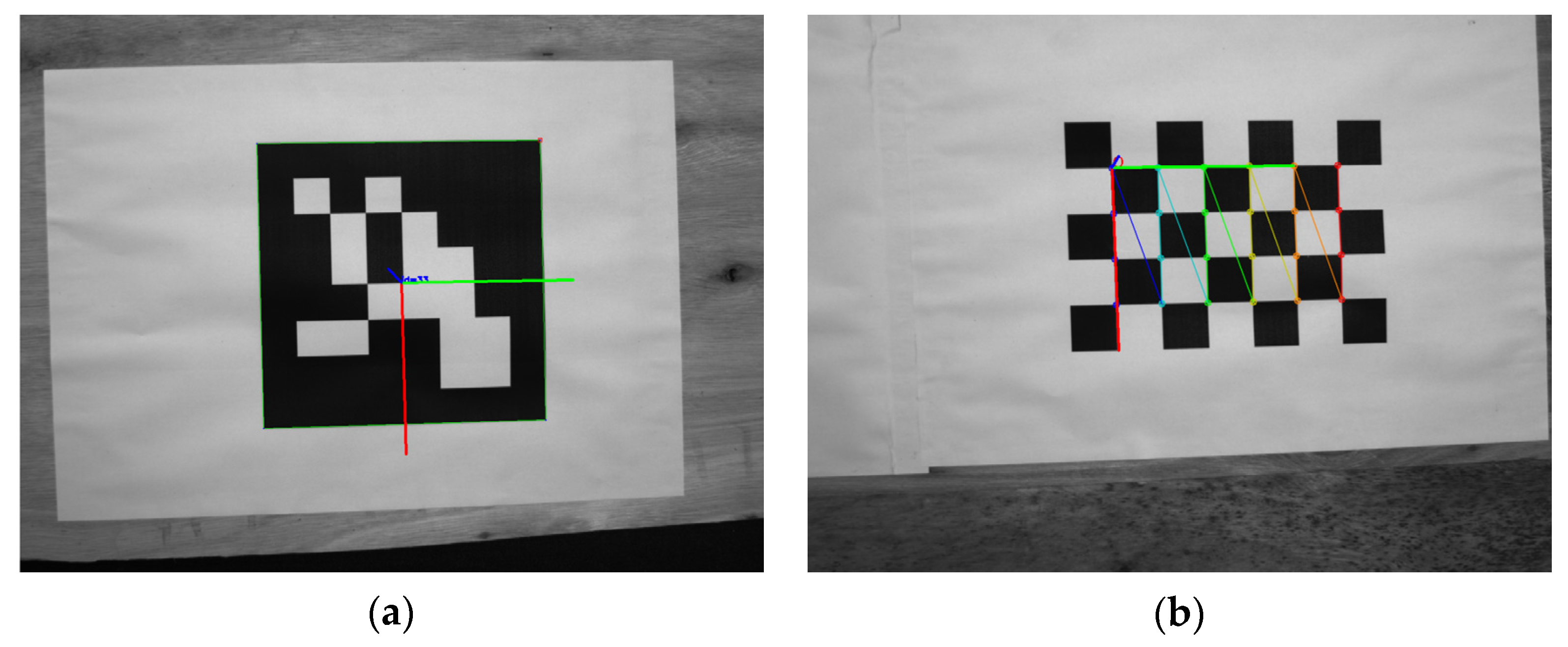
Sensors Free FullText Research of Online HandEye Calibration
Ros Camera Calibration Charuco Camera pose estimation using charuco chessboard. Knowing the targets to identify in. The function receives a list of detected corners and its. ros package for calibrating stereo cameras via checker or charuco boards. camera calibration using charuco. camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera pose estimation using charuco chessboard. this function calibrates a camera using a set of corners of a charuco board. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. camera calibration relies on predictably shaped and easy to localize calibration targets. We call realsense with python, calibrate with charuco marker board, and everything is.
From www.mdpi.com
Sensors Free FullText Research of Online HandEye Calibration Ros Camera Calibration Charuco Camera pose estimation using charuco chessboard. ros package for calibrating stereo cameras via checker or charuco boards. camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. The function receives a list of detected corners and its. camera calibration using charuco. We call realsense with python, calibrate with charuco marker board, and everything. Ros Camera Calibration Charuco.
From www.yygx.net
Calibration of multiple cameras based on ChArUco board Ros Camera Calibration Charuco camera calibration using charuco. Camera pose estimation using charuco chessboard. this function calibrates a camera using a set of corners of a charuco board. ros package for calibrating stereo cameras via checker or charuco boards. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. camera calibration relies on predictably shaped. Ros Camera Calibration Charuco.
From www.researchgate.net
5 CharUco board used for camera calibration, a.k.a estimation of Ros Camera Calibration Charuco this function calibrates a camera using a set of corners of a charuco board. The function receives a list of detected corners and its. ros package for calibrating stereo cameras via checker or charuco boards. camera calibration relies on predictably shaped and easy to localize calibration targets. We call realsense with python, calibrate with charuco marker board,. Ros Camera Calibration Charuco.
From www.youtube.com
ROS 2 Camera Calibration YouTube Ros Camera Calibration Charuco ros package for calibrating stereo cameras via checker or charuco boards. camera calibration using charuco. The function receives a list of detected corners and its. camera calibration relies on predictably shaped and easy to localize calibration targets. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. camera_calibration allows easy calibration. Ros Camera Calibration Charuco.
From wiki.ros.org
camera_calibration/Tutorials/StereoCalibration ROS Wiki Ros Camera Calibration Charuco camera calibration using charuco. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. this function calibrates a camera using a set of corners of a charuco board. We call realsense with python, calibrate with charuco marker board, and everything is. The function receives a list of detected corners and its. ros. Ros Camera Calibration Charuco.
From www.youtube.com
How to do Camera Calibration with ChArUco Boards YouTube Ros Camera Calibration Charuco Knowing the targets to identify in. this function calibrates a camera using a set of corners of a charuco board. We call realsense with python, calibrate with charuco marker board, and everything is. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. The function receives a list of detected corners and its. . Ros Camera Calibration Charuco.
From www.mdpi.com
Electronics Free FullText Charuco BoardBased Omnidirectional Ros Camera Calibration Charuco camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Knowing the targets to identify in. The function receives a list of detected corners and its. ros package for calibrating stereo cameras via checker or charuco boards. camera calibration relies on predictably shaped and easy to localize calibration targets. camera calibration using. Ros Camera Calibration Charuco.
From github.com
GitHub superjax/camera_imu_calibration A monocular camera/imu Ros Camera Calibration Charuco We call realsense with python, calibrate with charuco marker board, and everything is. The function receives a list of detected corners and its. camera calibration using charuco. this function calibrates a camera using a set of corners of a charuco board. ros package for calibrating stereo cameras via checker or charuco boards. Camera pose estimation using charuco. Ros Camera Calibration Charuco.
From www.mdpi.com
Sensors Free FullText Research of Online HandEye Calibration Ros Camera Calibration Charuco this function calibrates a camera using a set of corners of a charuco board. The function receives a list of detected corners and its. We call realsense with python, calibrate with charuco marker board, and everything is. camera calibration relies on predictably shaped and easy to localize calibration targets. camera calibration using charuco. camera_calibration will work. Ros Camera Calibration Charuco.
From wiki.ros.org
laser_camera_calibration ROS Wiki Ros Camera Calibration Charuco camera calibration relies on predictably shaped and easy to localize calibration targets. ros package for calibrating stereo cameras via checker or charuco boards. this function calibrates a camera using a set of corners of a charuco board. Camera pose estimation using charuco chessboard. The function receives a list of detected corners and its. We call realsense with. Ros Camera Calibration Charuco.
From www.researchgate.net
6 Camera calibration examples with ROS camera_calibration package Ros Camera Calibration Charuco camera calibration using charuco. camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. Knowing the targets to identify in. camera calibration relies on predictably shaped and easy to localize calibration targets. ros package for calibrating stereo. Ros Camera Calibration Charuco.
From www.mdpi.com
Electronics Free FullText Charuco BoardBased Omnidirectional Ros Camera Calibration Charuco this function calibrates a camera using a set of corners of a charuco board. camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera pose estimation using charuco chessboard. camera calibration relies on predictably shaped and easy to localize calibration targets. The function receives a list of detected corners and its. . Ros Camera Calibration Charuco.
From wiki.ros.org
camera_calibration/Tutorials/MonocularCalibration ROS Wiki Ros Camera Calibration Charuco camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Knowing the targets to identify in. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. The function receives a list of detected corners and its. Camera pose estimation using charuco chessboard. ros package for calibrating stereo cameras via. Ros Camera Calibration Charuco.
From www.yygx.net
Calibration of multiple cameras based on ChArUco board Ros Camera Calibration Charuco ros package for calibrating stereo cameras via checker or charuco boards. Camera pose estimation using charuco chessboard. camera calibration relies on predictably shaped and easy to localize calibration targets. We call realsense with python, calibrate with charuco marker board, and everything is. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. The. Ros Camera Calibration Charuco.
From www.youtube.com
ROS Camera Calibration (calibrating process) YouTube Ros Camera Calibration Charuco We call realsense with python, calibrate with charuco marker board, and everything is. ros package for calibrating stereo cameras via checker or charuco boards. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. The function receives a list of detected corners and its. Camera pose estimation using charuco chessboard. camera calibration relies. Ros Camera Calibration Charuco.
From reachpranjal19.medium.com
Intrinsic camera calibration in ROS Melodic by Pranjal Paul Medium Ros Camera Calibration Charuco The function receives a list of detected corners and its. ros package for calibrating stereo cameras via checker or charuco boards. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. camera calibration relies on predictably shaped and easy to localize calibration targets. Camera pose estimation using charuco chessboard. camera calibration using. Ros Camera Calibration Charuco.
From copterexpress.github.io
Camera calibration Clover Ros Camera Calibration Charuco this function calibrates a camera using a set of corners of a charuco board. camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. We call realsense with python, calibrate with charuco marker board, and everything is. ros package for calibrating stereo cameras via checker or charuco boards. The function receives a list. Ros Camera Calibration Charuco.
From github.com
GitHub leixiaoyuasdl/handeye_calibration_charuco Ros Camera Calibration Charuco ros package for calibrating stereo cameras via checker or charuco boards. camera_calibration will work with any camera driver node satisfying the standard ros camera interface. camera calibration using charuco. camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target. Camera pose estimation using charuco chessboard. this function calibrates a camera using. Ros Camera Calibration Charuco.